

SURABAYA — Departemen Teknik Perkapalan Institut Teknologi Sepuluh Nopember (ITS) sudah berkontribusi bagi industri maritim di Indonesia sejak lama. Kali ini, sumbangsih nyata dapat terlihat melalui pengembangan Remotely Operated Vehicle (ROV), sebuah kapal tanpa awak yang dinamai ROV W-101.
Ketua Tim Riset ROV W-101 Ir Wasis Dwi Aryawan MSc PhD menjelaskan penelitian tersebut mendapatkan dukungan dari Badan Riset dan Inovasi Nasional (BRIN) pada 2021. Selain itu, pengembangan kapal tanpa awak ini dapat menjadi penunjang sektor industri ketika mendayagunakan daerah bawah laut.
|
Baca juga:
Bappenas Apresiasi SDGs Center UNAIR
|
Alasannya, ungkap Wasis, karena penelitian ini dapat membuat kegiatan pengawasan alat bawah laut bisa dikerjakan oleh kapal pengendali jarak jauh secara autonomous atau tanpa pengemudi. “Sehingga pengembangan ROV W-101 ini akan mempersingkat proses pengawasan kabel dan pipa laut hingga eksplorasi laut Indonesia, ” jelas Kepala Departemen Teknik Perkapalan ITS ini.
Wasis melanjutkan, respons positif turut didapatkan dari penggiat industri perihal pengembangan kapal dengan berat 42 kg ini. Nantinya, akan diaplikasikan dalam bidang industri guna memantau kondisi pipa bawah laut dan mapping di area sekitar platform lepas pantai. “Dengan kerjasama bersama PT Radiant Utama Interinsco, kapal ini akan diuji coba untuk beroperasi di Selat Madura dalam waktu dekat, ” tambahnya.

Perawakan Prototipe ROV W-101 skala laboratorium dengan dimensi 75 x 42 x 35 cm ini didesain agar mampu menyelam hingga kedalaman 100 meter
Di sisi lain, salah satu anggota tim riset ROV W-101, Andhika Asmara ST menerangkan, kapal tanpa awak ini dilengkapi Inertia Measurement Unit (IMU) untuk mempertahankan posisinya ketika berada di bawah laut. Robot kapal ini dilengkapi dengan perangkat yang terintegrasi dengan enam mesin pendorong. Sehingga membuat kapal berada dalam posisi even keel yaitu dapat menjaga posisi agar tetap seimbang ketika beroperasi.
Dalam proses pengerjaannya, Andhika melanjutkan, kapal bawah air ini telah melewati berbagai simulasi untuk mendapatkan performa yang optimal ketika beroperasi. Berbagai pengujian yang telah dilakukan seperti analisis manuver, analisis Computational Fluid Dynamic (CFD), hingga analisis tekanan. “Hal tersebut bertujuan untuk memastikan kapal ini dapat beroperasi dengan baik ketika di lapangan, ” terangnya.
Lalu, karena daerah operasi kapal berada di laut lepas, maka segi konstruksi dan peralatan kapal turut menjadi salah satu perhatian utama. Tekanan dan gaya apung ketika kapal beroperasi menjadi sebuah tantangan bagi tim yang beranggotakan dosen dan mahasiswa ITS ini. Sehingga pembuatan body kapal dirancang agar struktur kapal tidak rusak ataupun mengalami kebocoran akibat tekanan air yang semakin besar ketika menyelam.
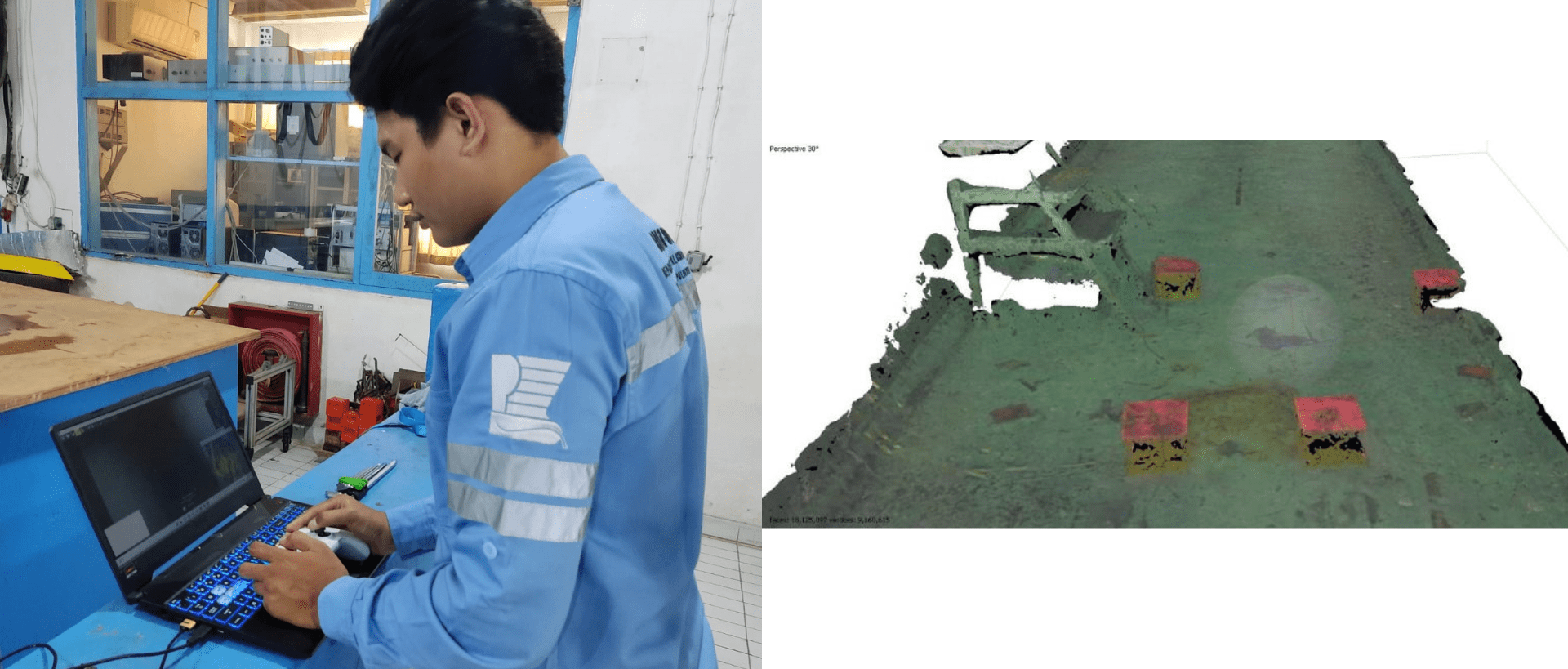
(kiri) Salah satu anggota tim riset ketika mengendalikan ROV W-101 secara jarak jauh menggunakan controller, (kanan) Visualisasi hasil tracking yang diperoleh ketika melakukan pemetaan bawah air di Laboratorium Hidrodinamika Departemen Teknik Perkapalan ITS
Sementara, lanjut Andhika, keunggulan dari kapal ini adalah kemudahannya dalam menambahkan perangkat tambahan. Adanya ruang untuk modifikasi membuat ROV karya sivitas ITS ini mampu menjawab berbagai kebutuhan dan misi lainnya. “Kapal ini dapat disesuaikan untuk menjalankan tugas tambahan seperti mengambil sampel bawah laut ataupun pengambilan data di bawah laut, ” jelas lulusan program sarjana Teknik Perkapalan ITS.
Mahasiswa yang tengah melanjutkan prodi magisternya di Departemen Teknik Perkapalan ITS ini menilai, ROV yang mampu menyelam selama satu jam ini memiliki nilai yang lebih ekonomis dibandingkan ROV di kelasnya. Selain itu, pembuatan kapal ini turut mengutamakan ketersediaan barang-barang yang ada di pasaran. “Sehingga membuka kemungkinan pemroduksiannya oleh industri dalam negeri, ” tutur pria asal Malang ini.
Melihat jauh kedepan, Andhika memastikan, pengembangan kapal yang telah dikerjakan mulai November hingga April lalu ini akan terus berlanjut agar dapat meningkatkan kapasitas serta performanya. “Kapal ini akan terus mengalami pengembangan dalam segi waktu operasi dan performanya serta agar dapat beroperasi secara autonomous, ” tutupnya.(*)
Reporter: Ricardo Hokky Wibisono
Redaktur: Najla Lailin Nikmah


























